Projects
Humanoid Robotic Arm


Project Overview
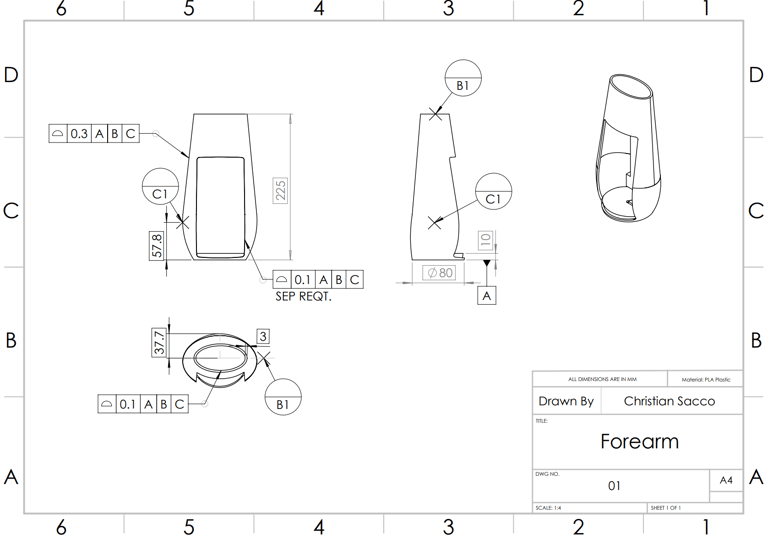
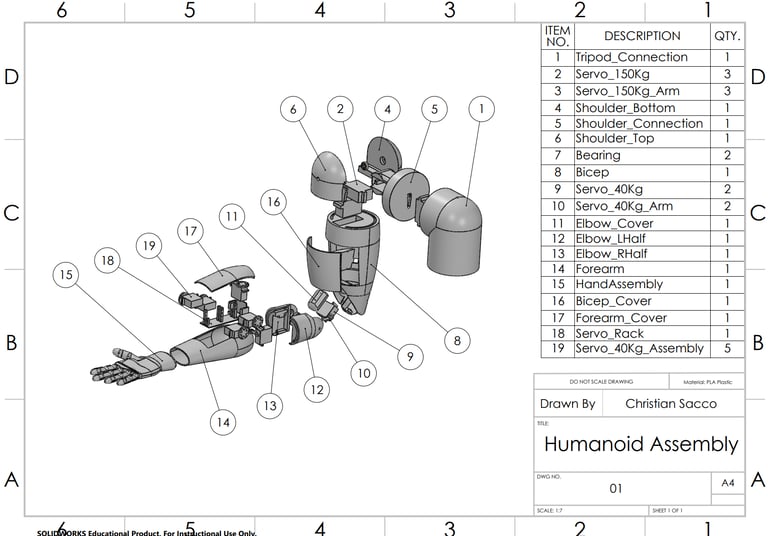
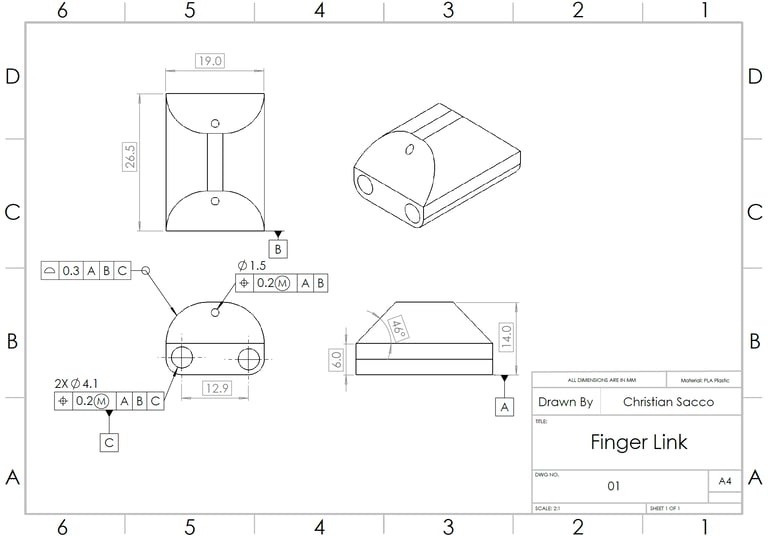
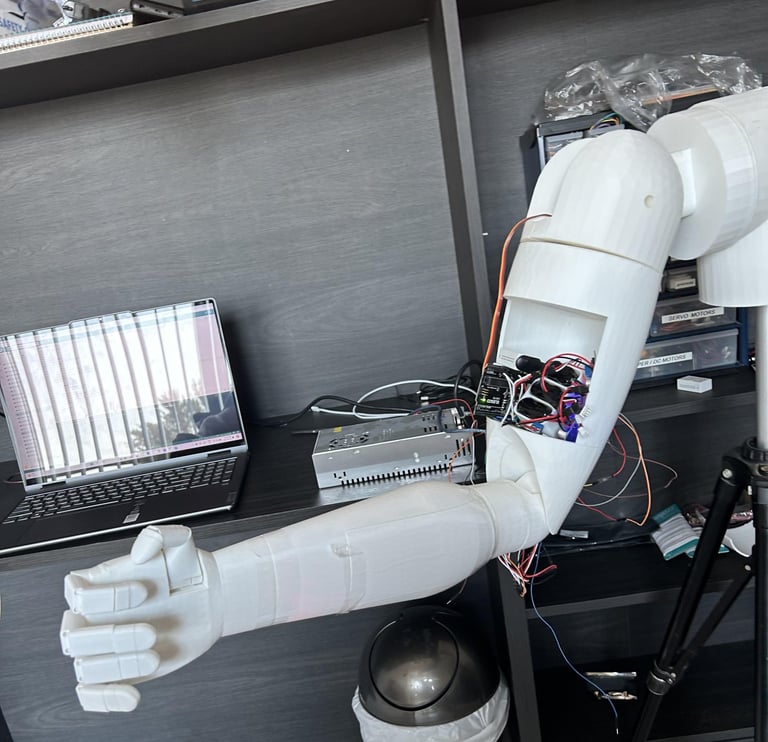
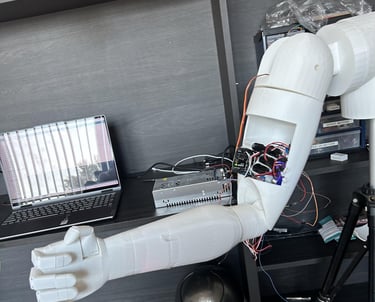
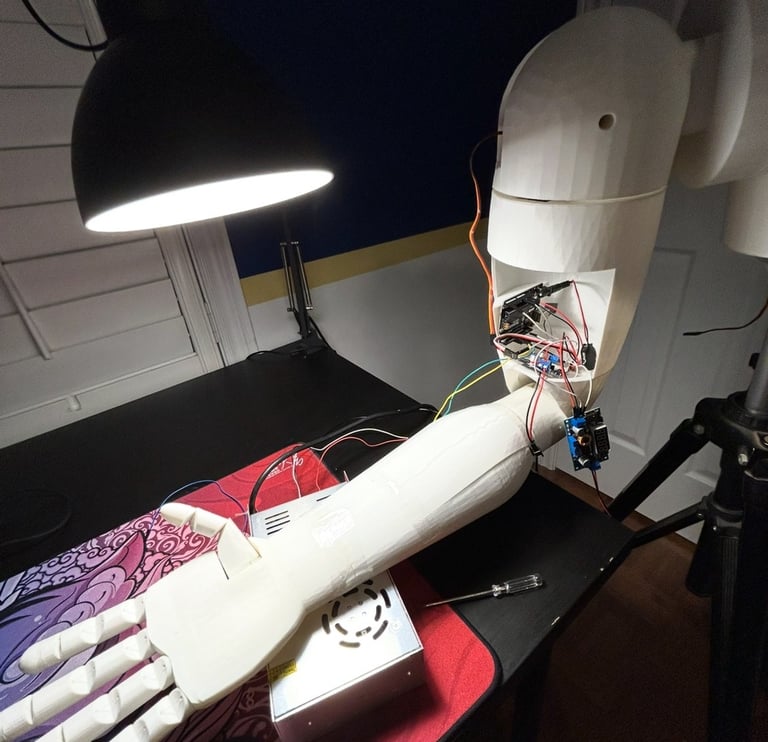
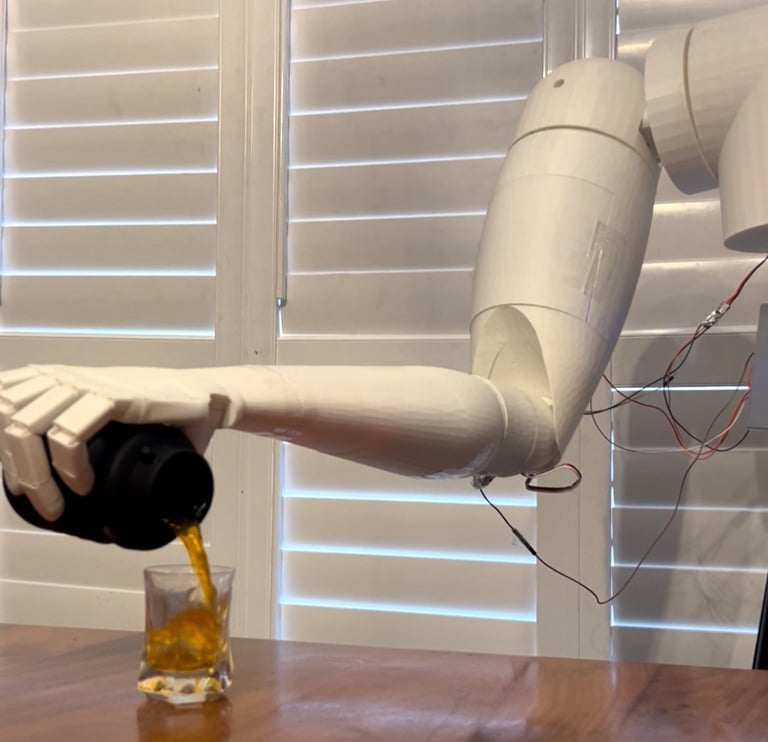
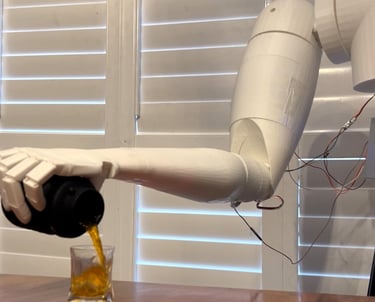
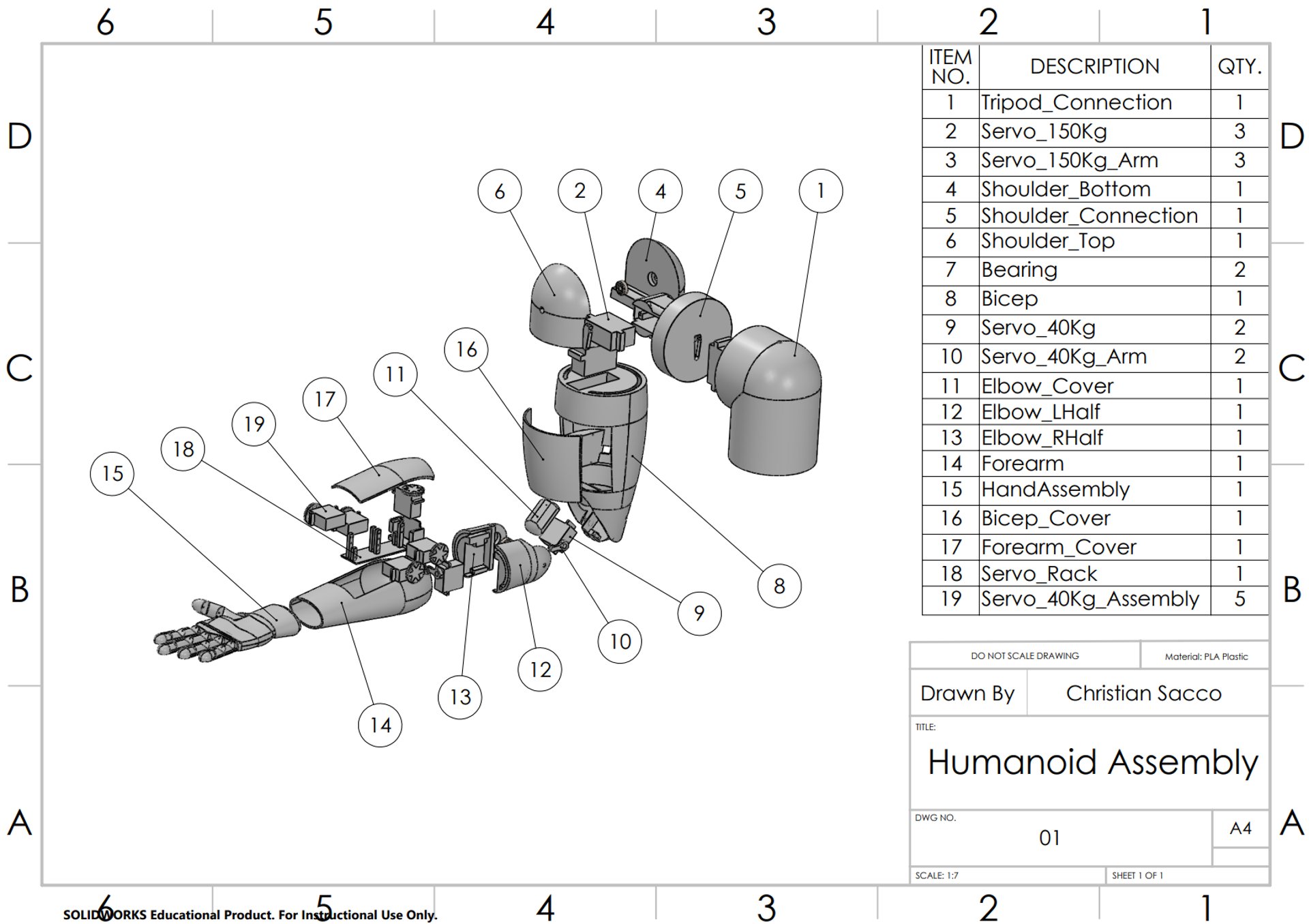
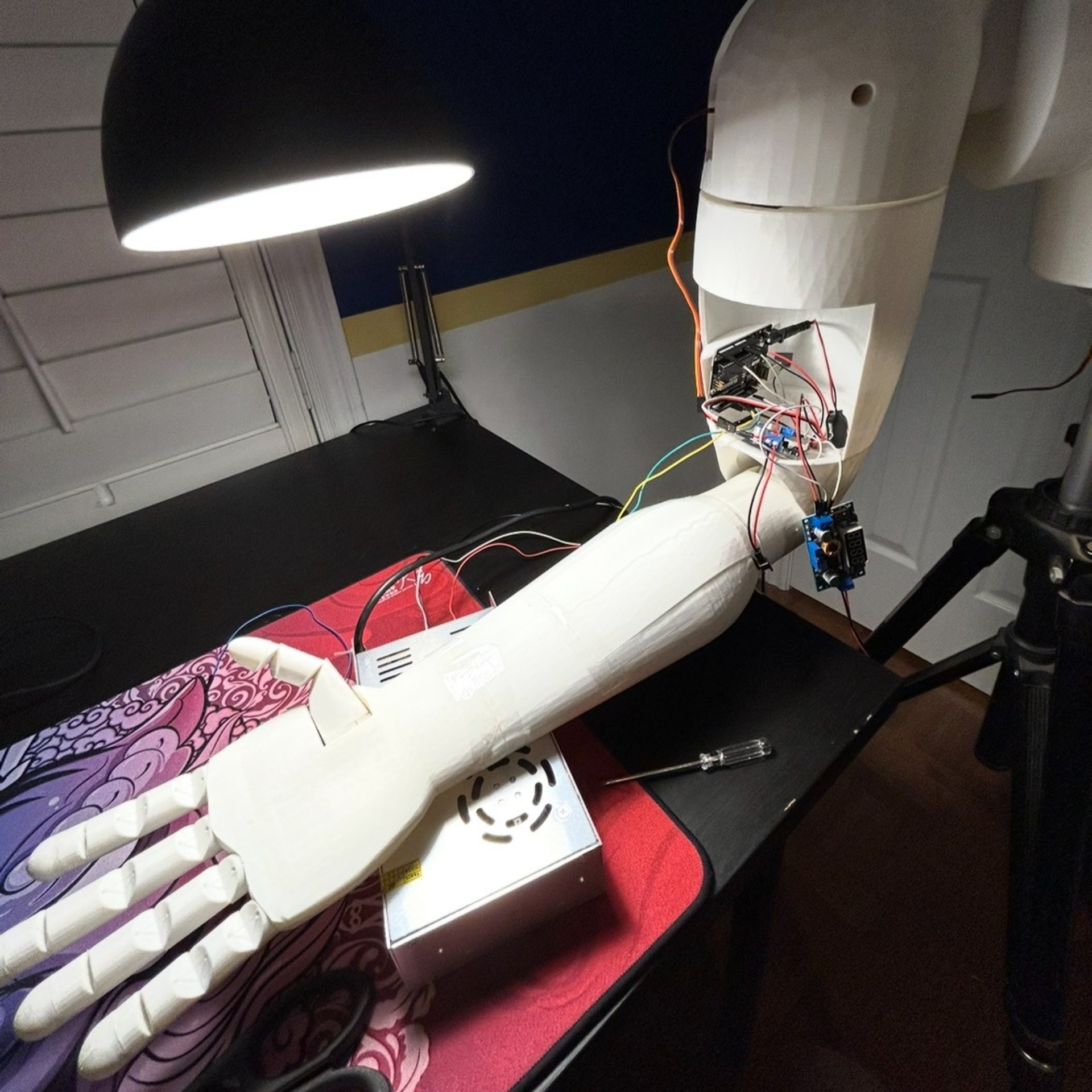
Designed a 11-DOF humanoid robotic arm using custom 3D-printed parts modeled in SolidWorks
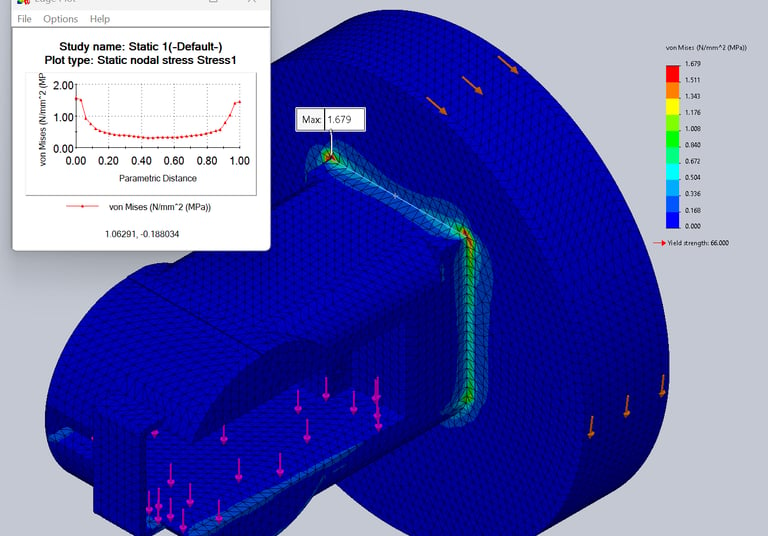
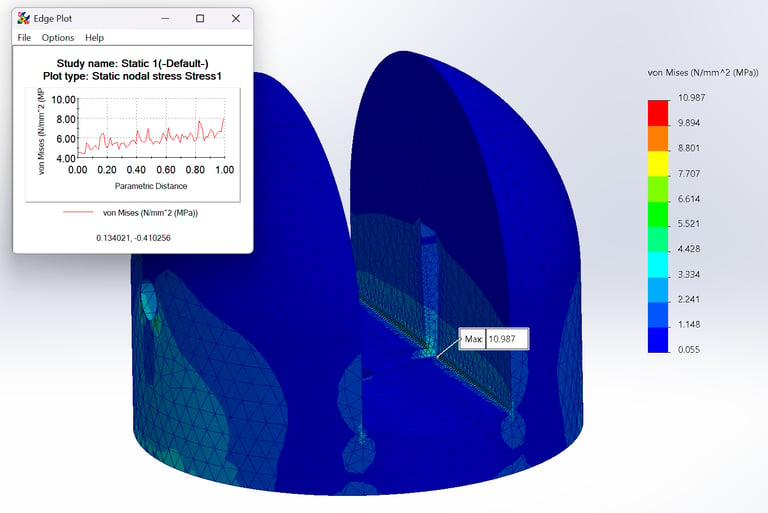
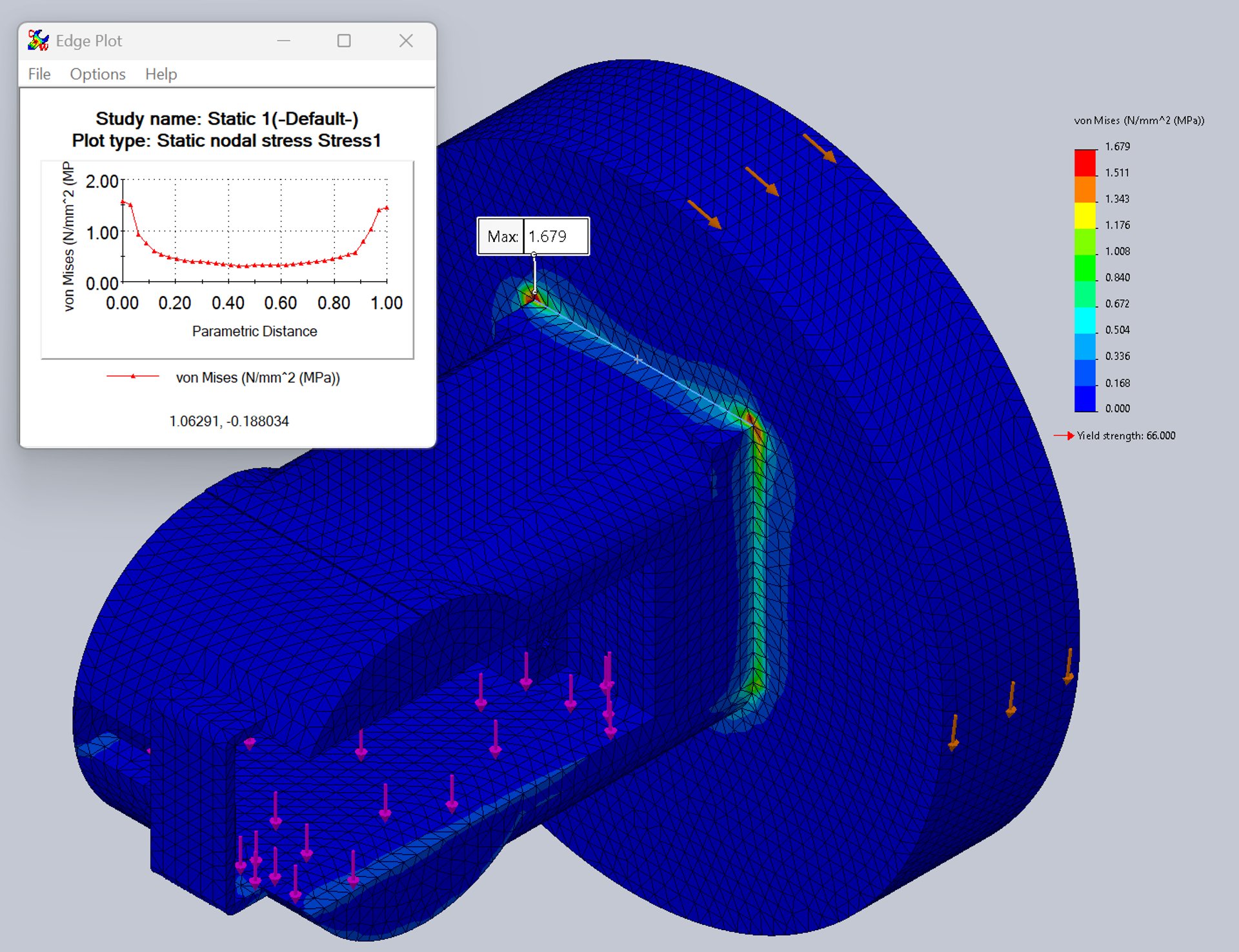
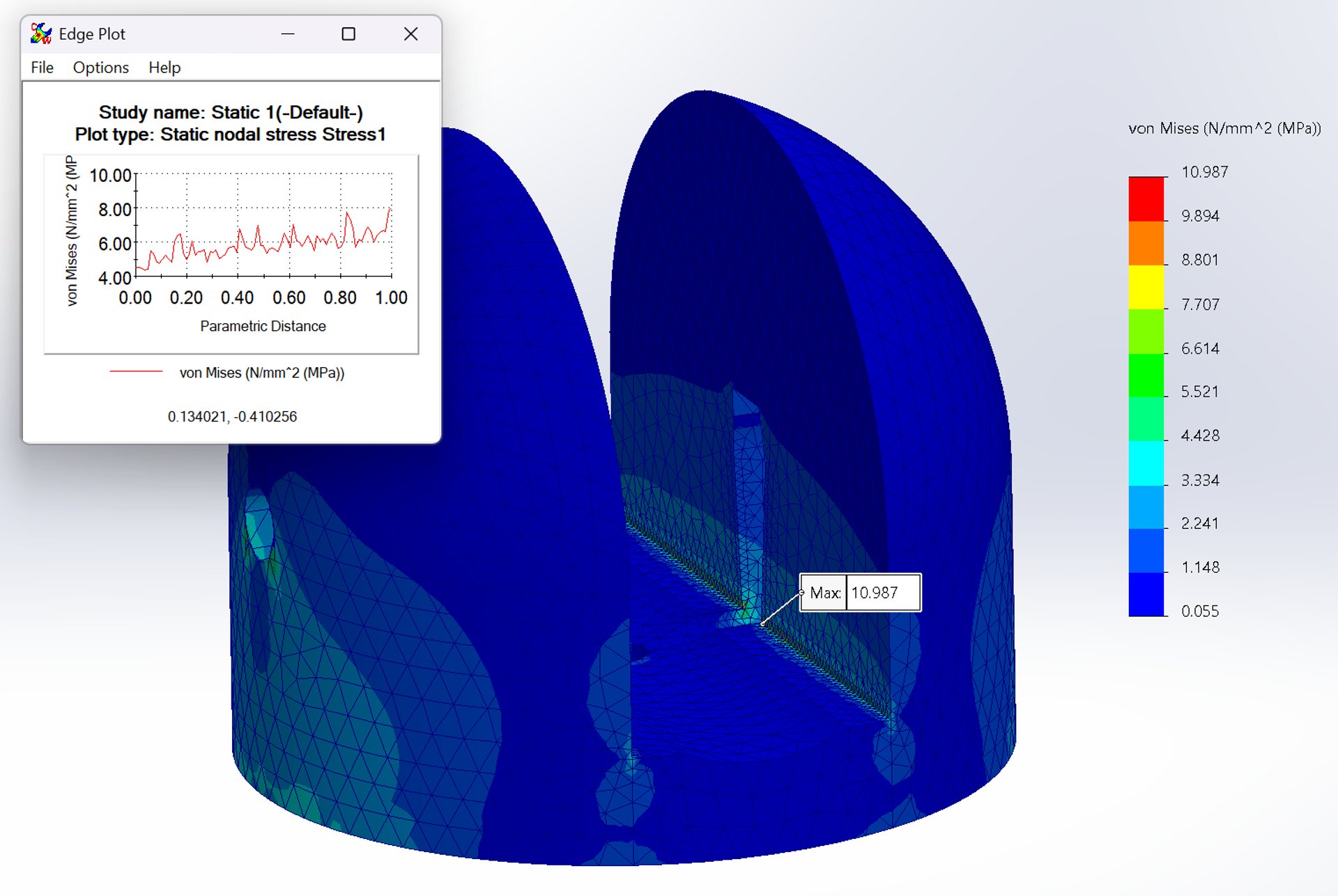
Used DFM/A principles, FEA analysis, and rapid prototyping to optimize performance for up to 7 kg load capacity
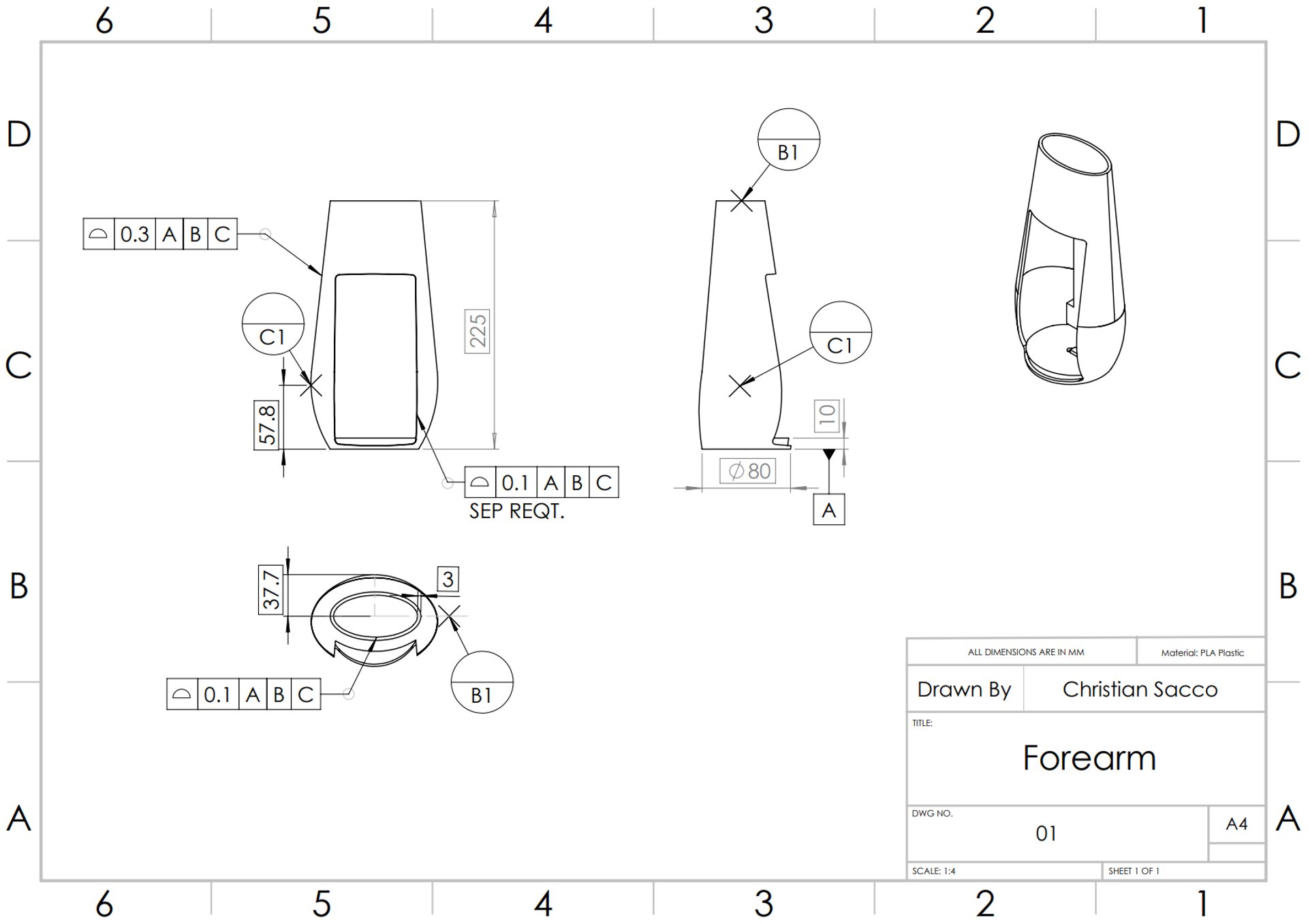
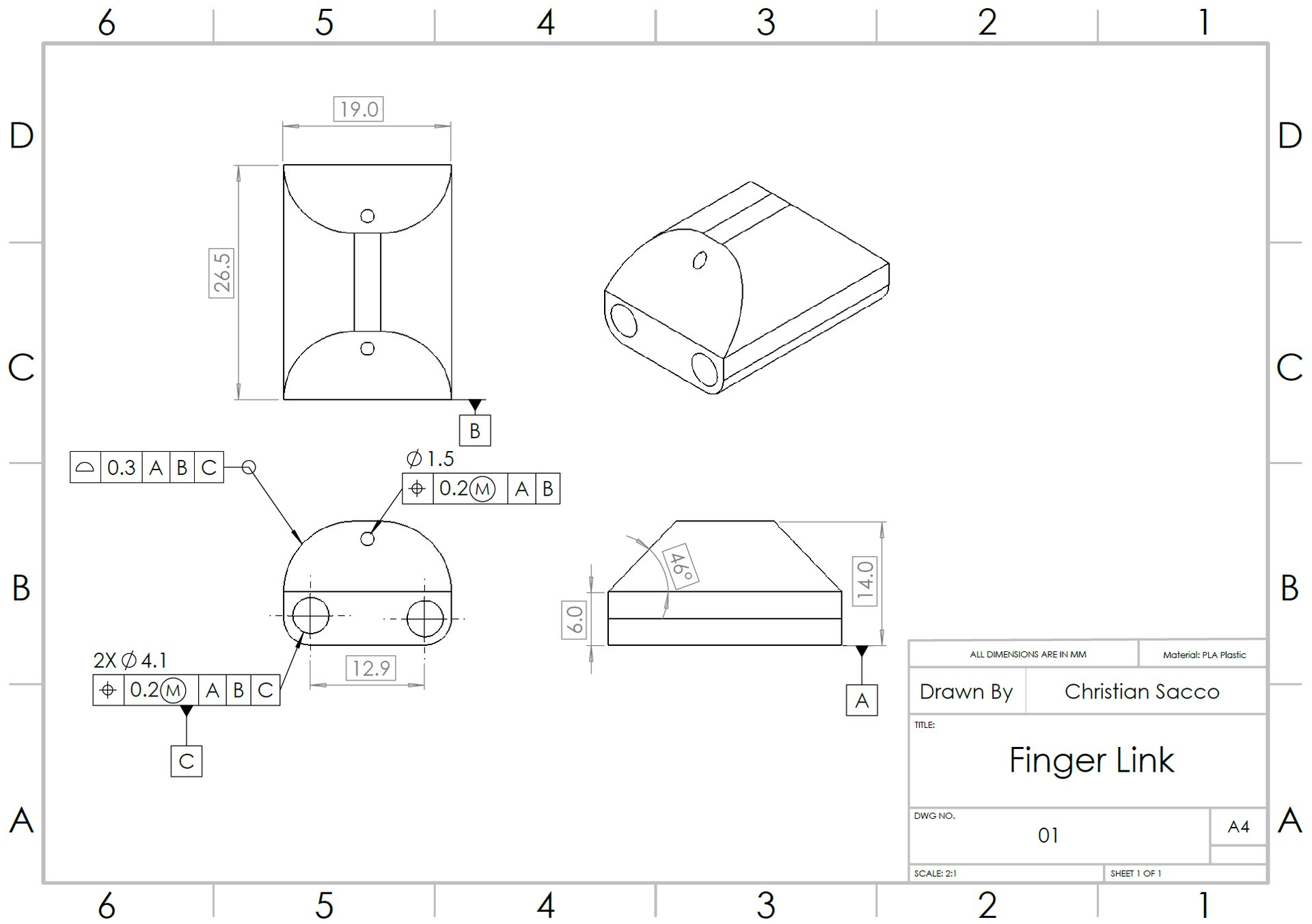
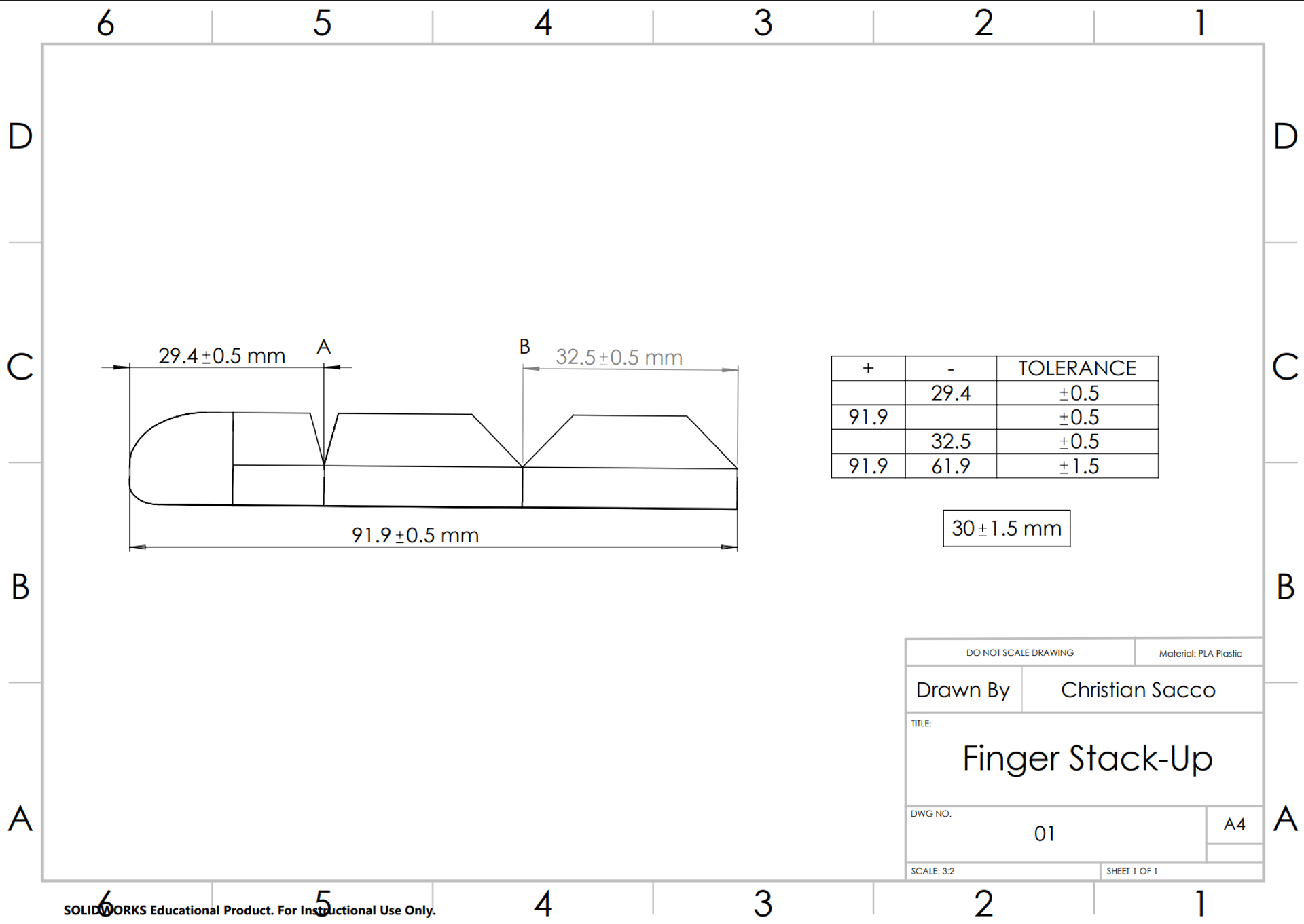
Created GD&T drawings, full BOMs, and tolerance stack-ups for precise manufacturing and assembly
Humanoid Robotic Arm
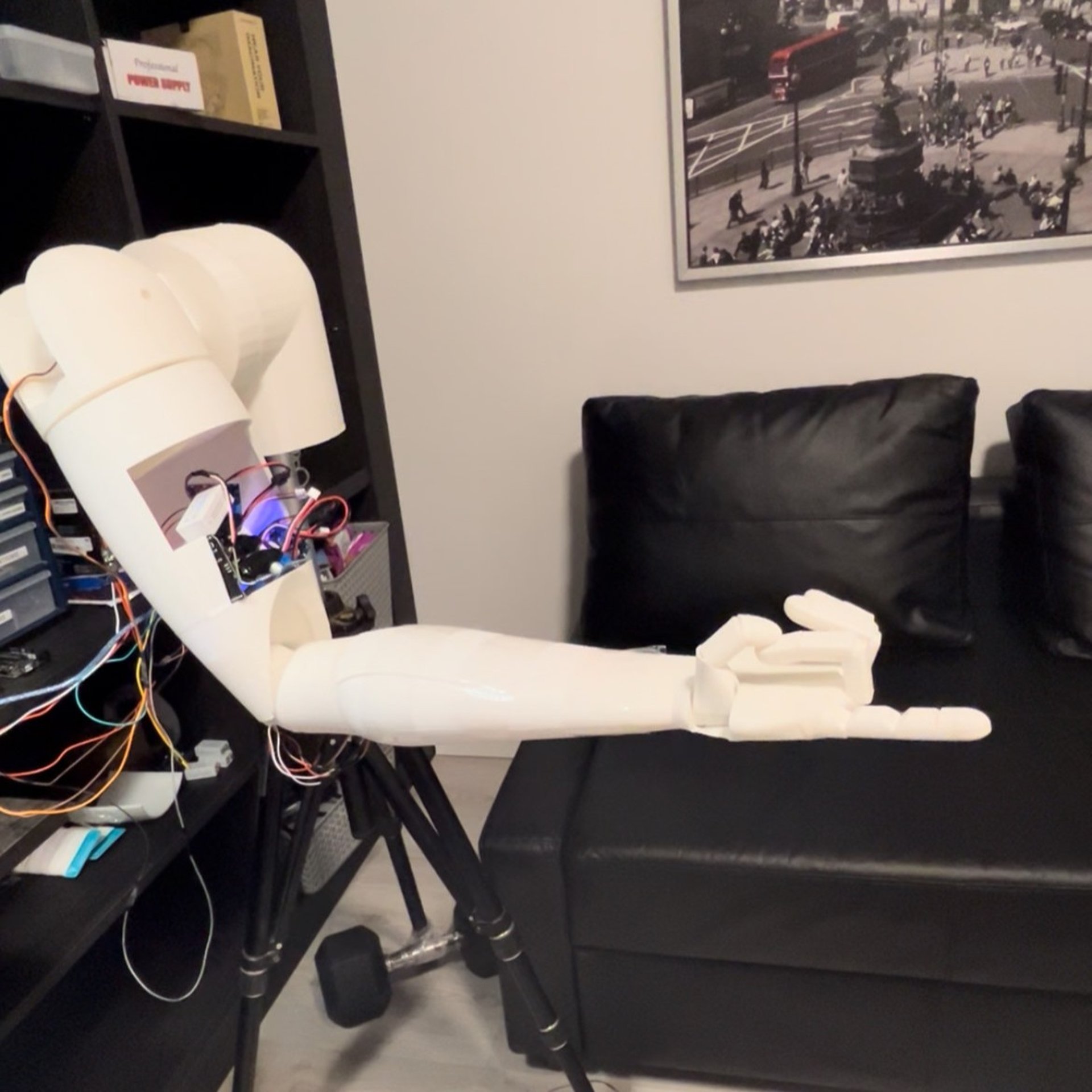
Designed a 11-DOF humanoid robotic arm using custom 3D-printed parts modeled in SolidWorks
Used DFM/A principles, FEA analysis, and rapid prototyping to optimize performance for up to 7 kg load capacity
Created GD&T drawings, full BOMs, and tolerance stack-ups for precise manufacturing and assembly
Project Overview







Watch the full project video here!
Project Video
Watch the full project video here!
Project Video
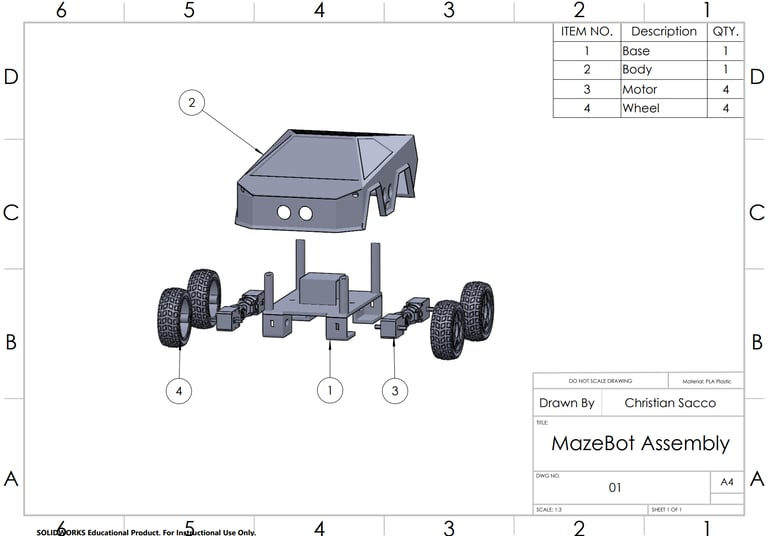
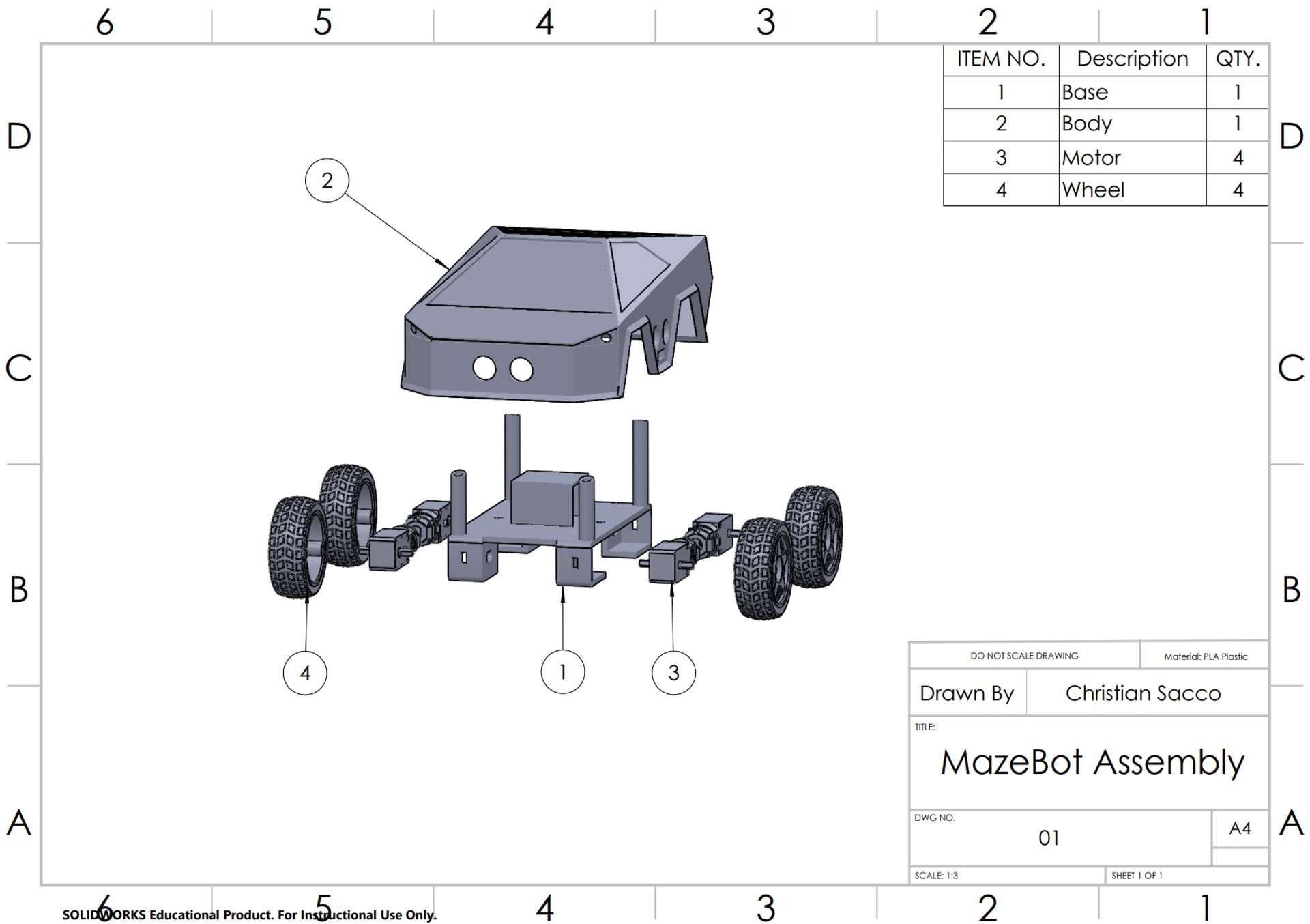
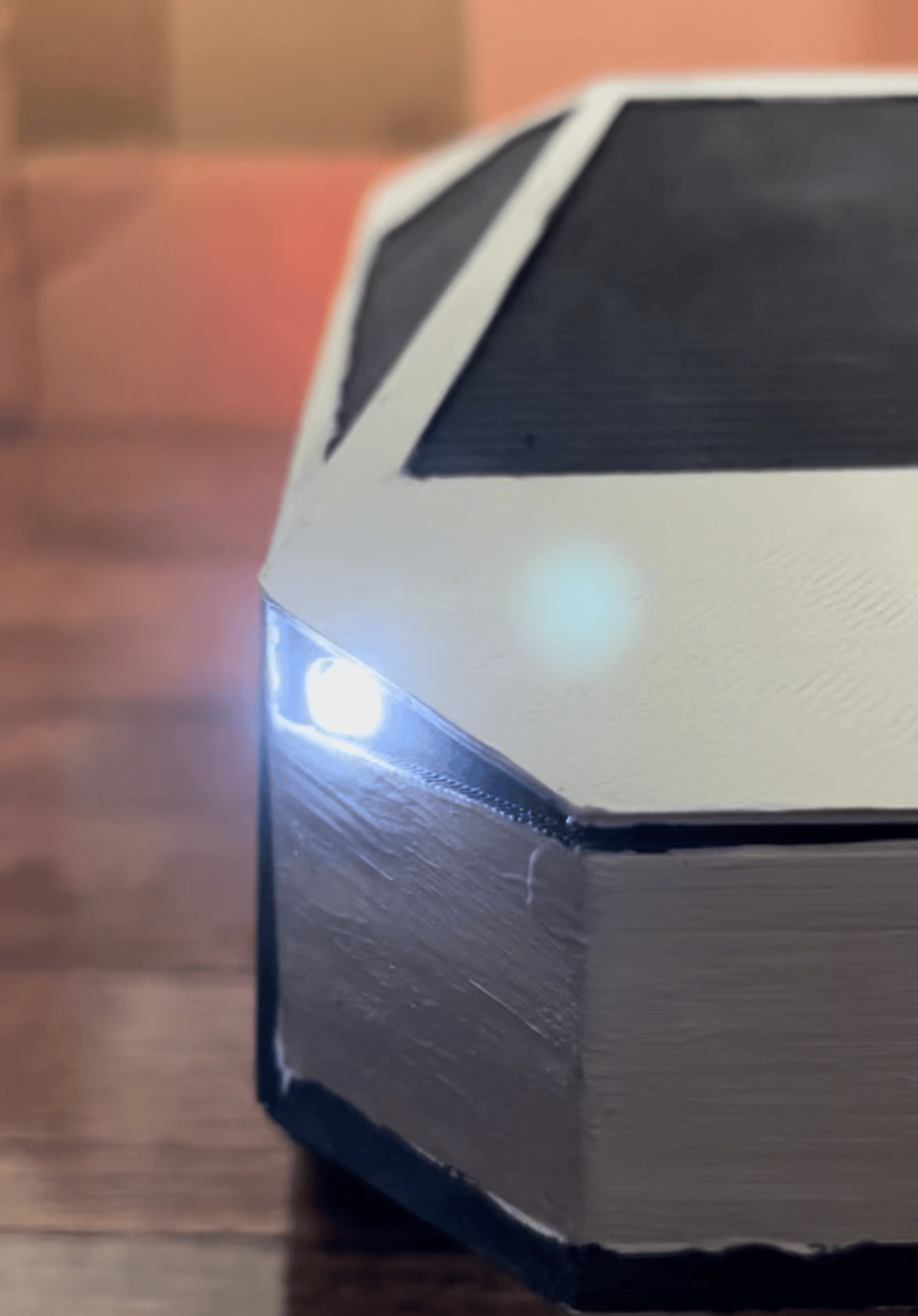
Maze Solving Robot

Maze Solving Robot
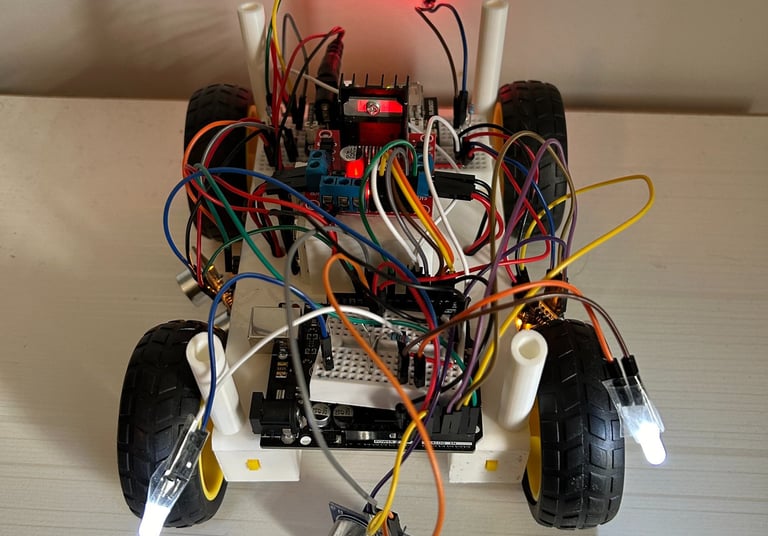
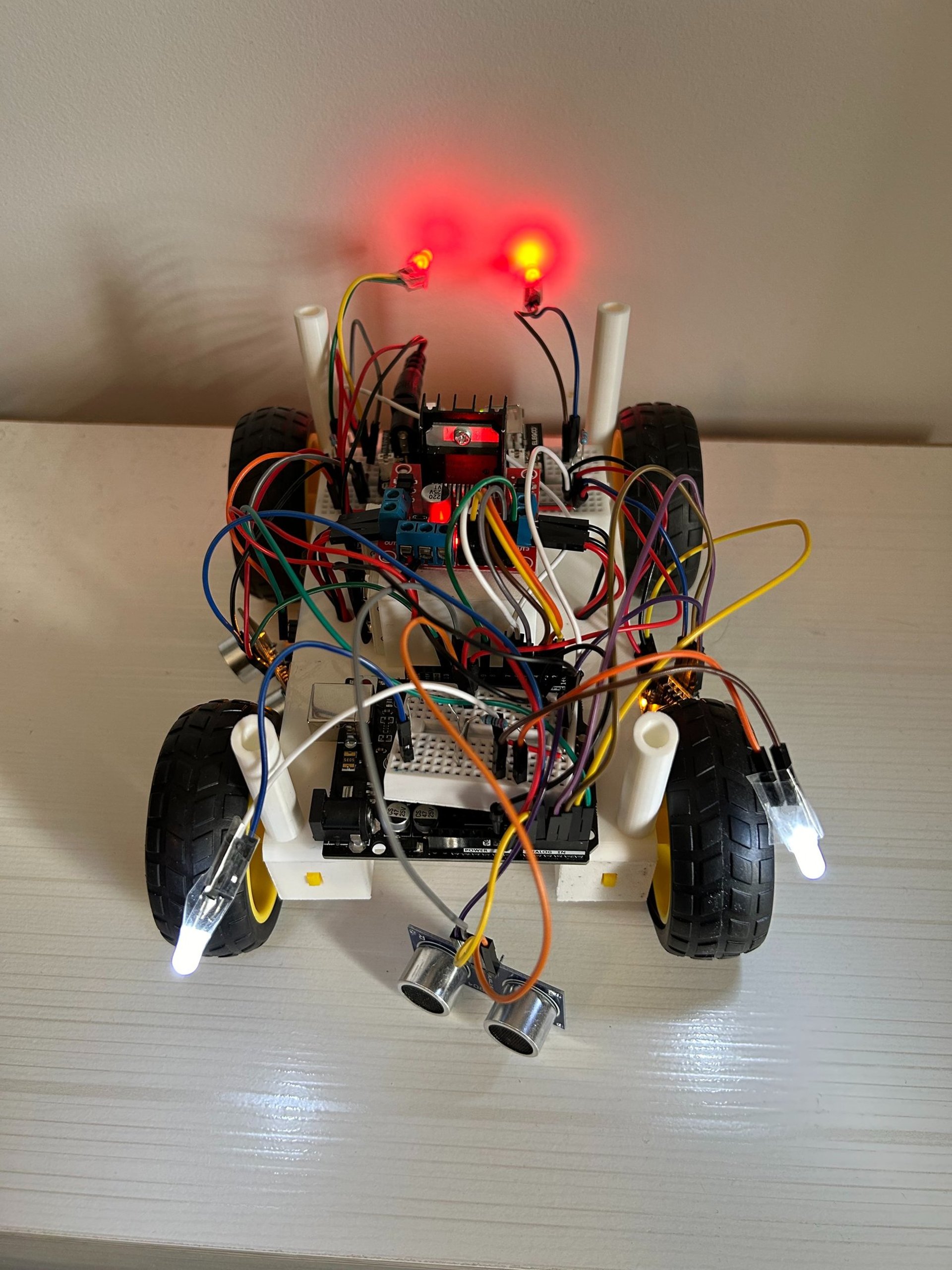
Designed a maze-solving robot using custom 3D-printed components modeled in Fusion 360
Integrated 5 IR sensors with Arduino for real-time environment detection and decision-making.
Developed and implemented C algorithms, allowing the robot to solve a complex maze with 12 turns in under 30 seconds.
Project Overview











Project Overview
Designed a maze-solving robot using custom 3D-printed components modeled in Fusion 360
Integrated 5 IR sensors with Arduino for real-time environmental detection and decision-making.
Developed and implemented C algorithms, allowing the robot to solve a complex maze with 12 turns in under 30 seconds.




Watch the full project video here!
Project Video
Watch the full project video here!